梯度消失
今天介绍RNN的梯度消失问题以及为了解决这个问题引出的RNN变种,如LSTM何GRU。
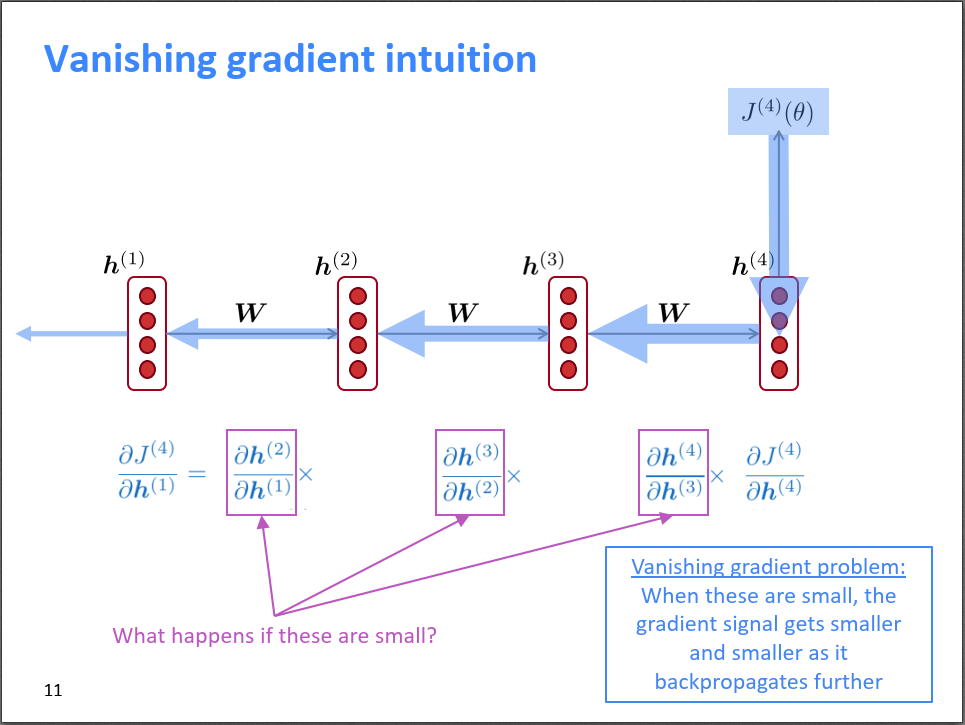
在上一篇博客中,通过公式推导,我们已经解释了RNN为什么容易产生梯度消失或梯度爆炸的问题,核心问题就是RNN在不同时间步使用共享参数\(W\),导致\(t+n\)时刻的损失对\(t\)时刻的参数的偏导数存在\(W\)的指数形式,一旦\(W\)很小或很大就会导致梯度消失或梯度爆炸的问题。下图形象的显示了梯度消失的问题,即梯度不断反传,梯度不断变小(箭头不断变小)。
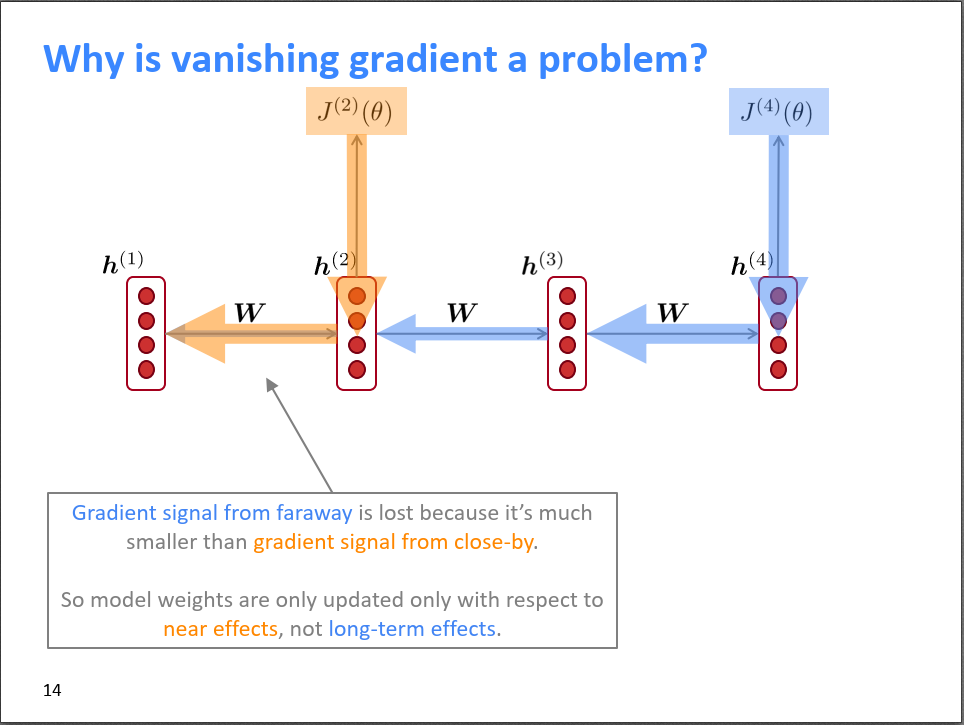
梯度消失会带来哪些问题呢?一个很明显的问题就是参数更新更多的受到临近词的影响,那些和当前时刻\(t\)较远的词对当前的参数更新影响很小。如下图所示,\(h^{(1)}\)对\(J^{(2)}(\theta)\)的影响就比对\(J^{(4)}(\theta)\)的影响大。久而久之,因为梯度消失,我们就不知道\(t\)时刻是真的对\(t+n\)时刻没影响还是因为梯度消失导致我们没学习到这种影响。
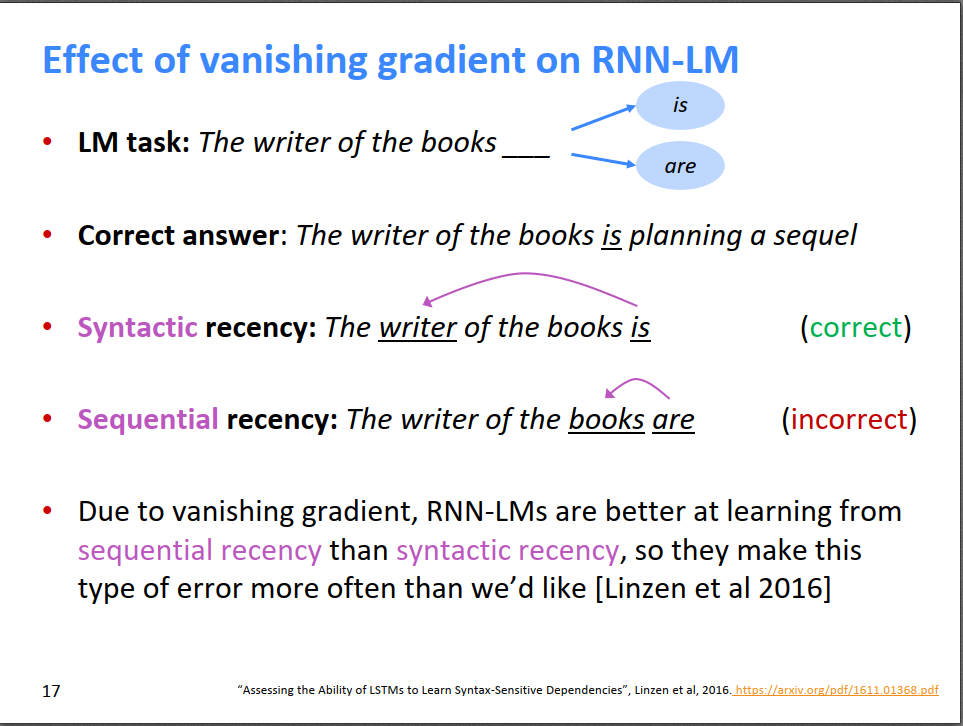
下图是一个更形象的例子,假设我们需要预测句子The writer of the books下一个单词,由于梯度消失,books对下一个词的影响比writer对下一个词的影响更大,导致模型错误的预测成了are,但这显然是不对的。
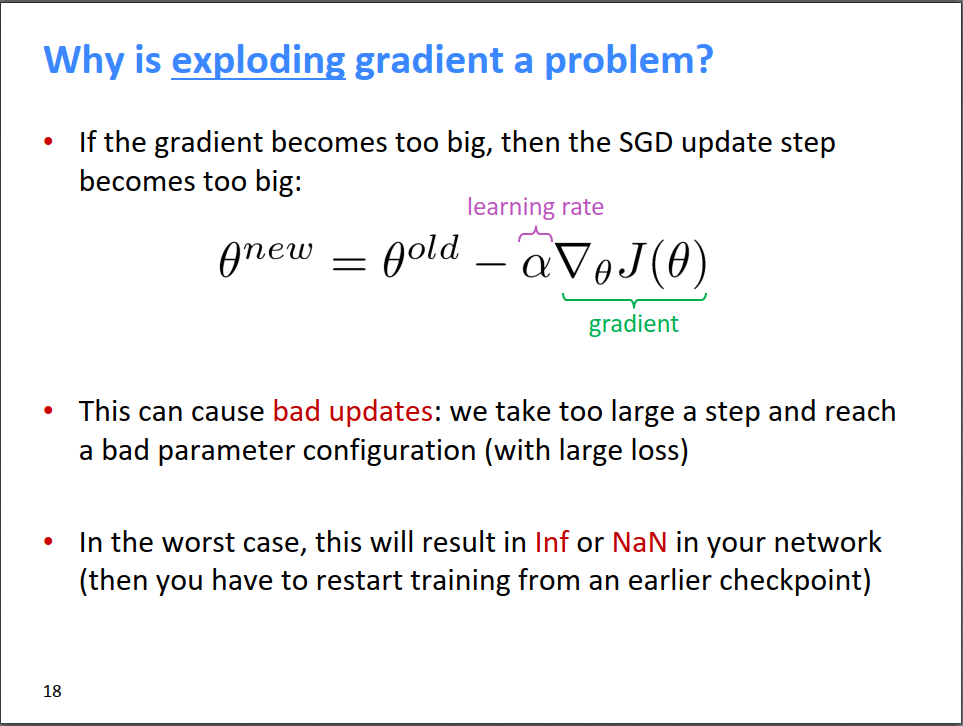
类似的,如果梯度爆炸,则根据梯度下降的更新公式,参数会一瞬间更新非常大,导致网络震荡,甚至出现Inf或NaN的情况。
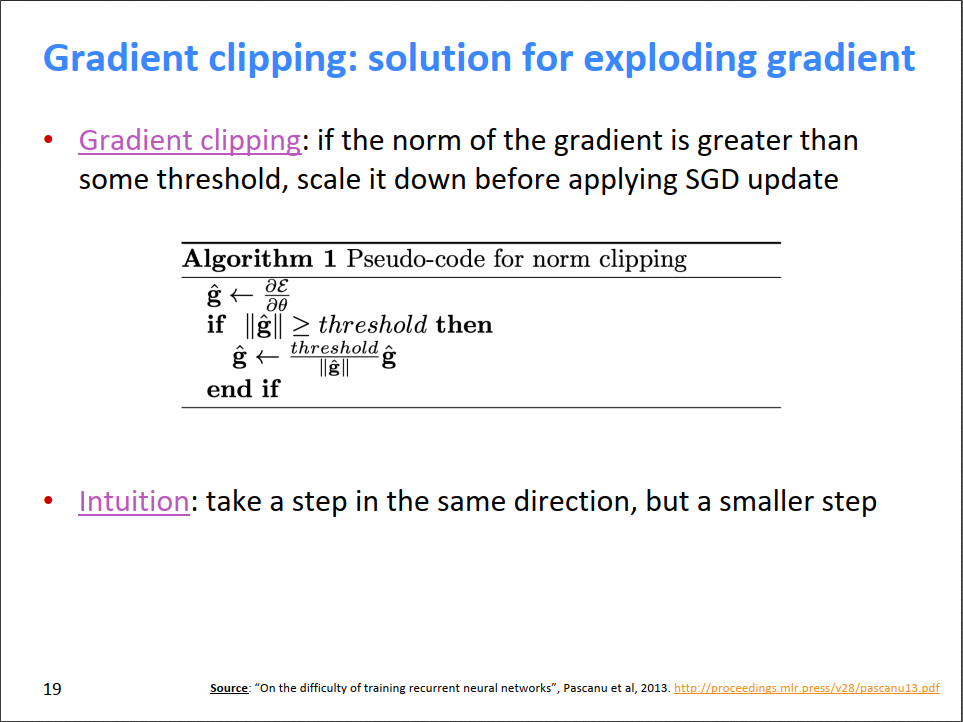
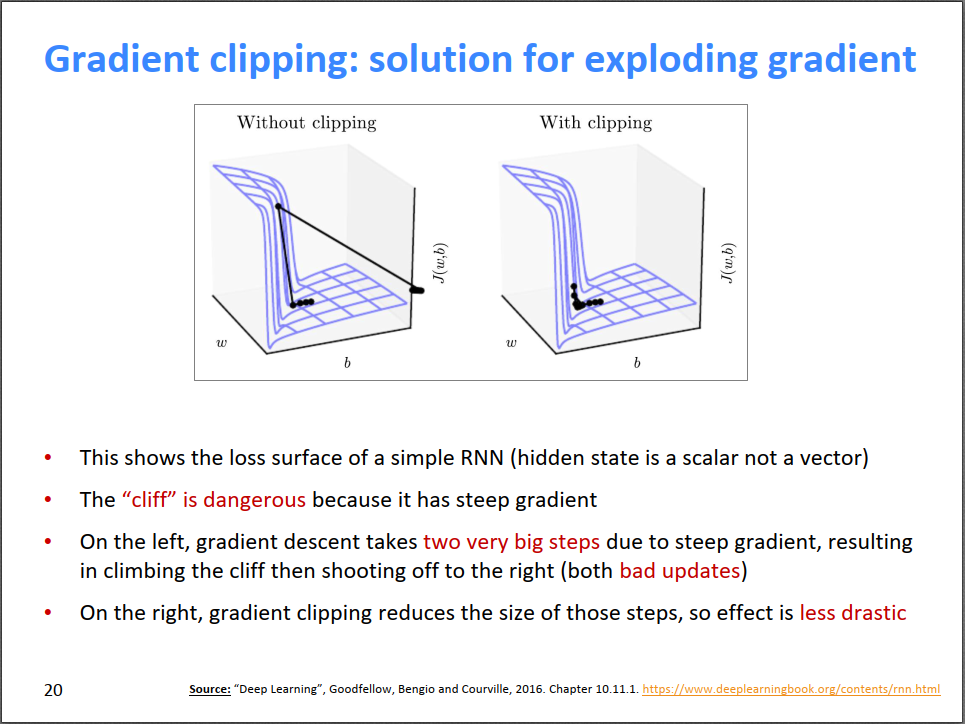
梯度爆炸一个比较好的解决方法是梯度裁剪,即如果发现梯度的范数大于某个阈值,则以一定的比例缩小梯度的范数,但不改变其方向。如下下图所示,左子图是没有梯度裁剪的情况,由于RNN的梯度爆炸问题,导致快接近局部极小值时,梯度很大,参数突然爬上悬崖,然后又飞到右边一个随机的区域,miss掉了中间的局部极小值。右子图是增加了梯度裁剪之后,更新步伐变小,参数稳定在局部极小值附近。
 |  |
|---|
总的来说,梯度爆炸相对好解决,但梯度消失就没那么简单了。在RNN中,每个时刻\(t\),都改写了前一个时刻的隐状态,而由于梯度消失问题,长距离以前的状态对当前时刻的影响又很小,所以导致无法建模长距离依赖关系。那么,如果把每个时刻的状态单独保存起来,是否能解决长距离依赖问题呢?
LSTM
LSTM就是这样一个思路,请大家结合如下两幅图来理解:
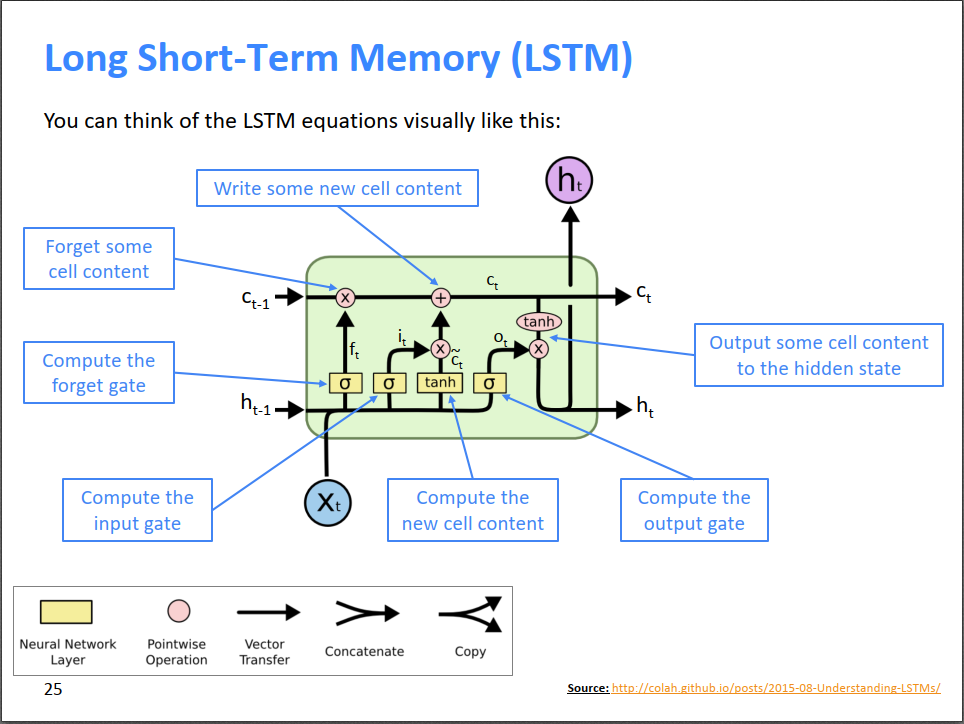
- (下图)首先,从宏观上来说,LSTM的隐层神经元不仅包含隐状态\(h_t\),还专门开辟了一个cell来保存过去的“记忆”\(c_t\),LSTM希望用\(c_t\)来传递很久以前的信息,以达到长距离依赖的目的。所以LSTM隐层神经元的输入是上一时刻的隐状态\(h_{t-1}\)和记忆\(c_{t-1}\),输出是当前时刻的隐状态\(h_t\)和希望传递给下一个时刻的记忆\(c_t\)。
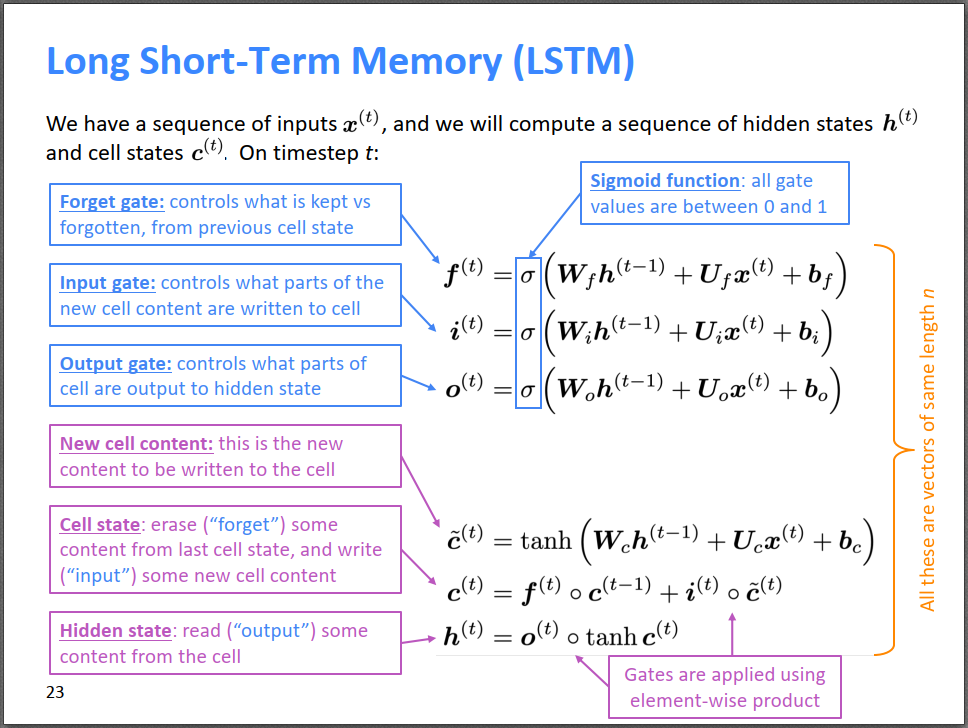
- (上图)每个时刻\(t\),为了调控遗忘哪些记忆,写入哪些新记忆,LSTM设置了两个门,分别是遗忘门\(f^{(t)}\)和写入门\(i^{(t)}\)。它们都是上一时刻的隐状态\(h^{(t-1)}\)和当前时刻的输入\(x^{(t)}\)的函数。\(f^{(t)}\)控制遗忘哪些记忆,即\(f^{(t)}\circ c^{(t-1)}\);\(i^{(t)}\)控制写入哪些新记忆,即\(i^{(t)}\circ \tilde c^{(t)}\),其中\(\tilde c^{(t)}\)即为期望写入的新记忆,它也是\(h^{(t-1)}\)和\(x^{(t)}\)的函数。最终,新时刻\(t\)的记忆就是这两部分的组合,请看上图\(c^{(t)}\)表达式。
- (上图)输出门\(o^{(t)}\)控制哪些记忆需要输出到下一个隐状态\(h^{(t)}\),\(o^{(t)}\)自己又是\(h^{(t-1)}\)和\(x^{(t)}\)的函数。
大家结合上图的公式和下图的示意图就不难理解了。
 |  |
|---|
LSTM解决梯度消失最直接的方法就是,遗忘门选择不遗忘,每一时刻的\(f^{(t)}\)都选择记住前一时刻的记忆\(c^{(t-1)}\),然后直接传递给下一时刻。那么,所有前\(t-1\)时刻的记忆都会被完整的传递给第\(t\)时刻,从而对\(t\)时刻的输出产生影响。
而朴素RNN无法保存前期状态的原因就是因为朴素RNN把之前时间步的信息都一股脑存储在隐状态\(h^{(t)}\)中了,隐状态\(h^{(t)}\)成为了整个网络的瓶颈,一旦出现梯度消失,则很久以前的信息对当前时刻的影响就微乎其微了。LSTM的关键就是开辟了一个新的cell来存储记忆,这个新的cell相当于记忆的一条捷径,时刻\(t\)除了可以像常规RNN一样通过\(h^{(t-1)}\)来获取很久以前的信息,还可以通过cell存储的记忆\(c^{(t-1)}\)来便捷地获取到很久以前的信息,所以隐状态\(h^{(t)}\)不再成为整个网络的瓶颈,有新的cell来分担。
需要提醒的是,虽然LSTM开辟新的cell来存储记忆,但这个记忆也会受到连续梯度相乘的影响,所以依然存在梯度消失或梯度爆炸的问题,但从实际效果来看,LSTM性能很不错,也很鲁棒。
GRU
另一种能缓解RNN梯度消失的网络——GRU。为了简化LSTM,GRU又没有cell了,但依然保留了门来控制信息的传递。首先看下图最后一个公式,当前时刻的隐状态\(h^{(t)}\)等于上一时刻的隐状态\(h^{(t-1)}\)和新写入的隐状态\(\tilde h^{(t)}\)的加权平均,通过更新门\(u^{(t)}\)来控制它们之间的比例,\(u^{(t)}\)是上一时刻的隐状态\(h^{(t-1)}\)和当前时刻的输入\(x^{(t)}\)的函数。新写入的隐状态\(\tilde h^{(t)}\)又通过一个重置门\(r^{(t)}\)来控制,类似的,\(r^{(t)}\)也是\(h^{(t-1)}\)和\(x^{(t)}\)的函数。
个人觉得,GRU中的更新门\(u^{(t)}\)类似于LSTM中的输出门\(o^{(t)}\);GRU中的重置门\(r^{(t)}\)类似于LSTM中的遗忘门\(f^{(t)}\)和写入门\(i^{(t)}\)的组合;GRU中新写入的隐状态\(\tilde h^{(t)}\)类似于LSTM中的细胞记忆\(c^{(t)}\)。所以,可以把GRU看作LSTM的简化版本。
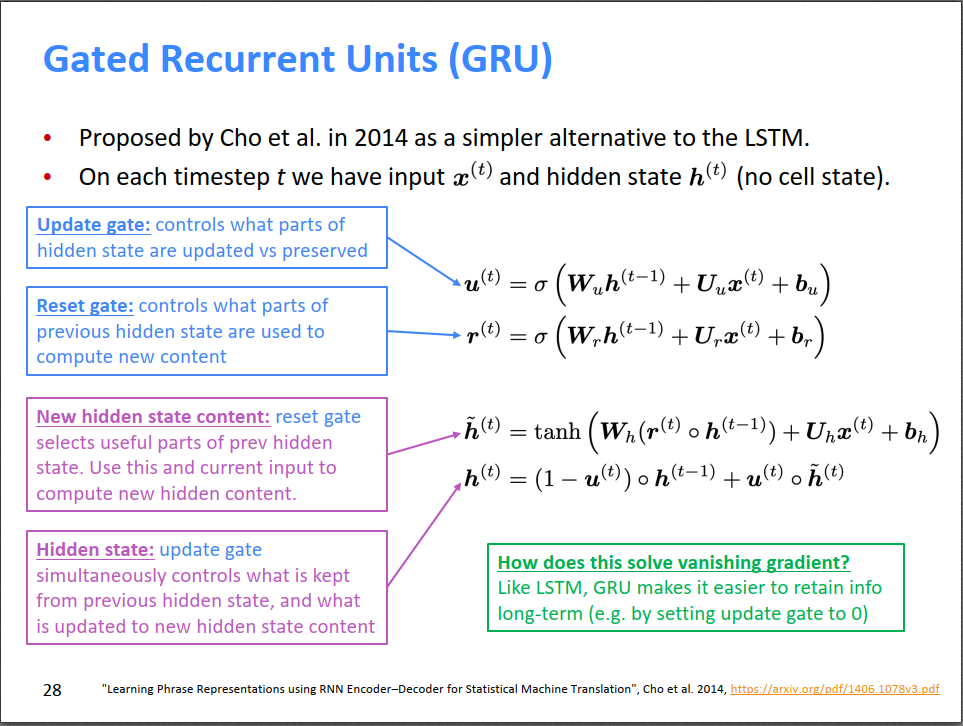
直观来说,GRU和LSTM类似,解决梯度消失的策略就是新增\(u^{(t)}\)来控制\(h^{(t-1)}\)和\(\tilde h^{(t)}\)的比例,如果\(u^{(t)}=0\),则\(h^{(t)}=h^{(t-1)}\),即\(t\)时刻的隐状态和上一时刻的隐状态相同,虽然这肯定效果不好,但至少说明GRU是有能力保留之前的隐状态的。
GRU和LSTM的性能差不多,但GRU参数更少,更简单,所以训练效率更高。但是,如果数据的依赖特别长且数据量很大的话,LSTM的效果可能会稍微好一点,毕竟参数量更多。所以默认推荐使用LSTM。
其他缓解梯度消失的策略
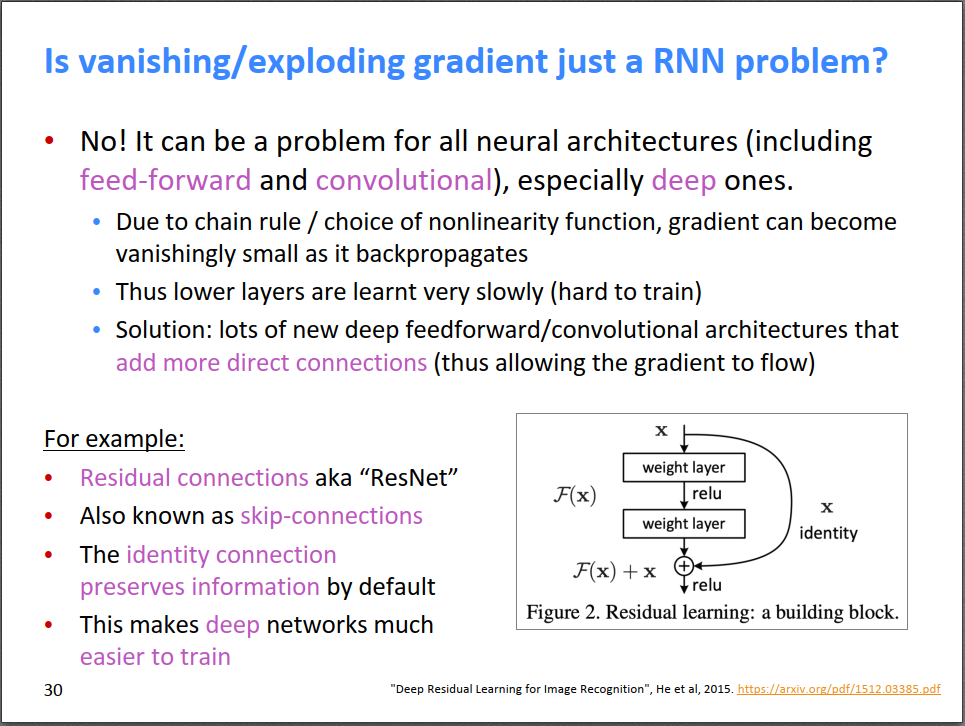
由于链式法则,或者所选非线性激活函数的原因,不仅仅RNN,所有神经网络都存在梯度消失或者梯度爆炸的问题,比如全连接网络和CNN。一些通用解决方法如下:
ResNet。因为梯度是在传递的过程中逐渐减小并消失的,如果跨越好几层直接进行连接,天然能保持远距离信息。个人理解,这就相当于买家和卖家直接相连,没有中间商赚差价\(\mathcal F(x)\),买到的价格最接近卖出的价格\(x\)。能一定程度上减弱梯度消失的问题。
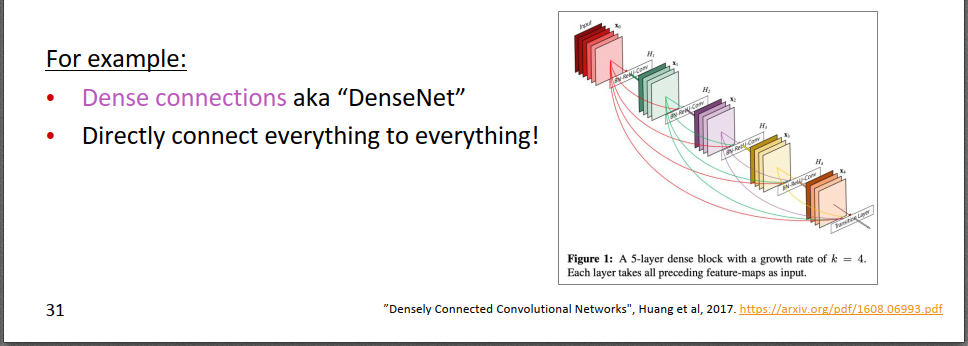
更激进的是DenseNet,把跨越多层之间的很多神经元都连起来,也就是说有更多的线路没有中间商赚差价,进一步减弱梯度消失问题。
HighwayNet。借鉴了LSTM和GRU的思路,不是像ResNet一样直接新增一条直连线路\(x\),而是搞一个平衡因子\(u\),卖家到买家的价格由\(u\)进行调和平均:\(u*\mathcal F(x)+(1-u)*x\),用\(u\)来控制多少走中间商,多少走直连线路。
虽然所有神经网络都存在梯度消失的问题,但RNN的这个问题更严重,因为它连乘的是相同的权重矩阵W,而且RNN针对的是序列问题,往往更深。
双向RNN
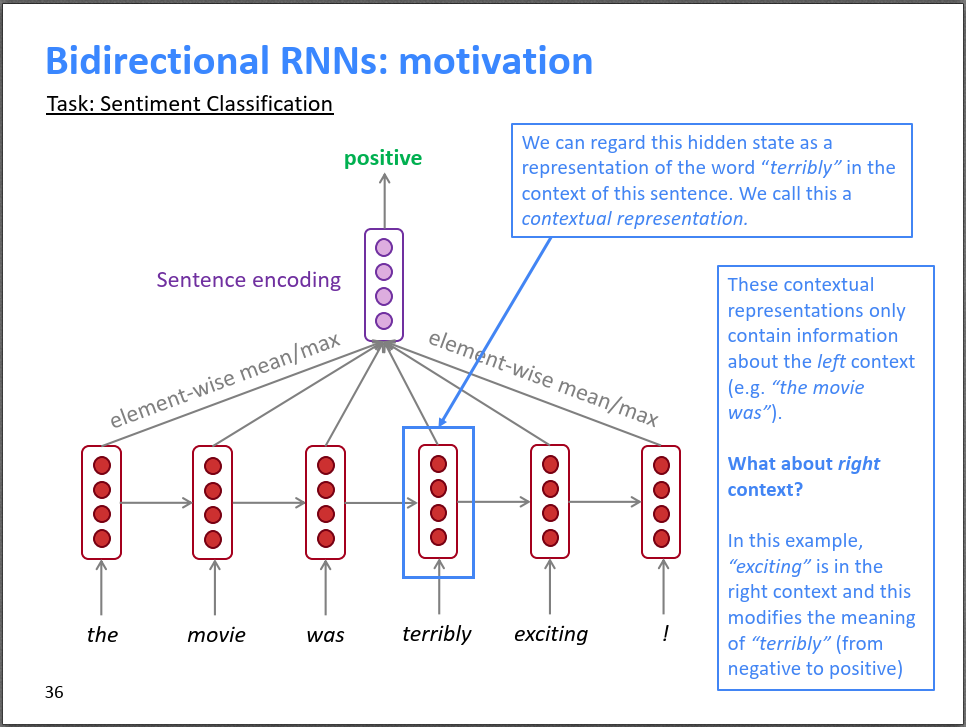
假设我们在对句子进行情感分类,如下图所示。对于terribly这个词,常规RNN,terribly的梯度只能看到左边的信息,看不到右边的信息,因为网络是从左到右的。单独看terribly或者从左往右看,在没有看到exciting时,可能认为terribly是贬义词,但是如果跟右边的exciting结合的话,则意思变为强烈的褒义词,所以有必要同时考虑左边和右边的信息。
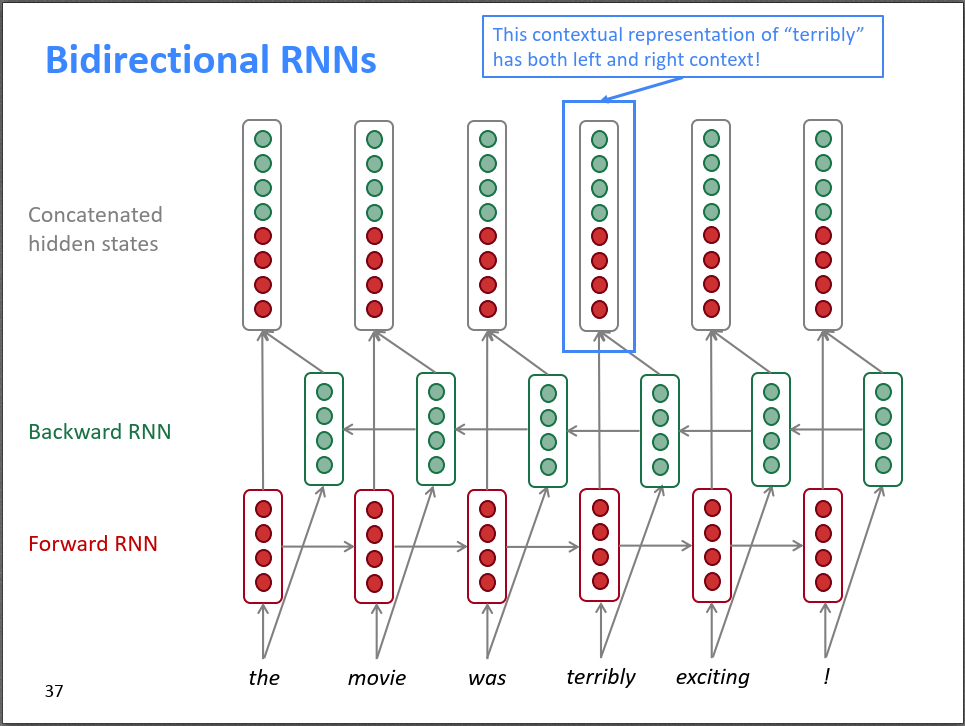
双向RNN包含两个RNN,一个从左往右,一个从右往左,两个RNN的参数是独立的。最后把两个RNN的输出拼接起来作为整体输出。那么,对于terribly这个词,它的梯度能同时看到左边和右边的信息。
由于双向RNN对于某个时刻\(t\),既需要知道\(t\)时刻前的信息(Forward RNN),又需要知道\(t\)时刻之后的信息(Backward RNN),所以双向RNN无法用于学习语言模型,因为语言模型只知道时刻\(t\)之前的信息,下一时刻的词需要模型来预测。对于包含完整序列的NLP问题,双向RNN应该是默认选择,它通常比单向RNN效果更好。
多层RNN
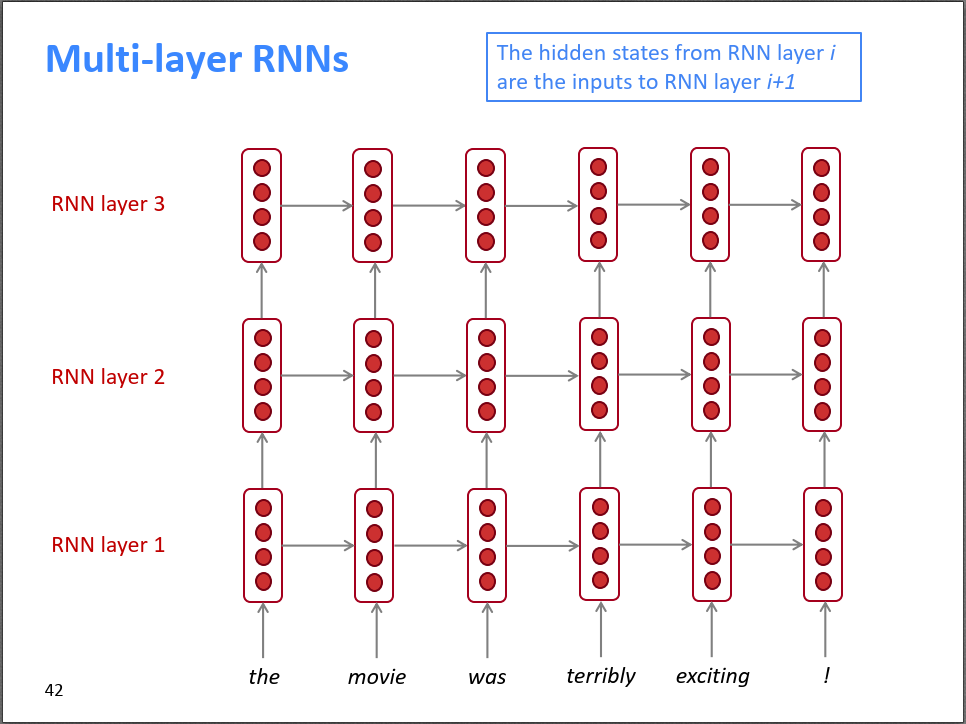
前面展示的RNN从时间\(t\)的维度上来说可以认为是多层的,但是RNN还可以从另一个维度来增加层数。如下图所示,将上一层(RNN layer 1)的输出作为下一层(RNN layer 2)的输入,不断堆叠下去,变成一个多层RNN。通常来说,深度越大,性能越好,如果梯度下降能训练好的话。
RNN的层数通常不会很深,不会像CNN一样,达到上百层,RNN通常2层,最多也就8层。一方面是RNN的梯度消失问题比较严重,另一方面是RNN训练的时候是串行的,不易并行化,导致网络太深的话训练很花时间。
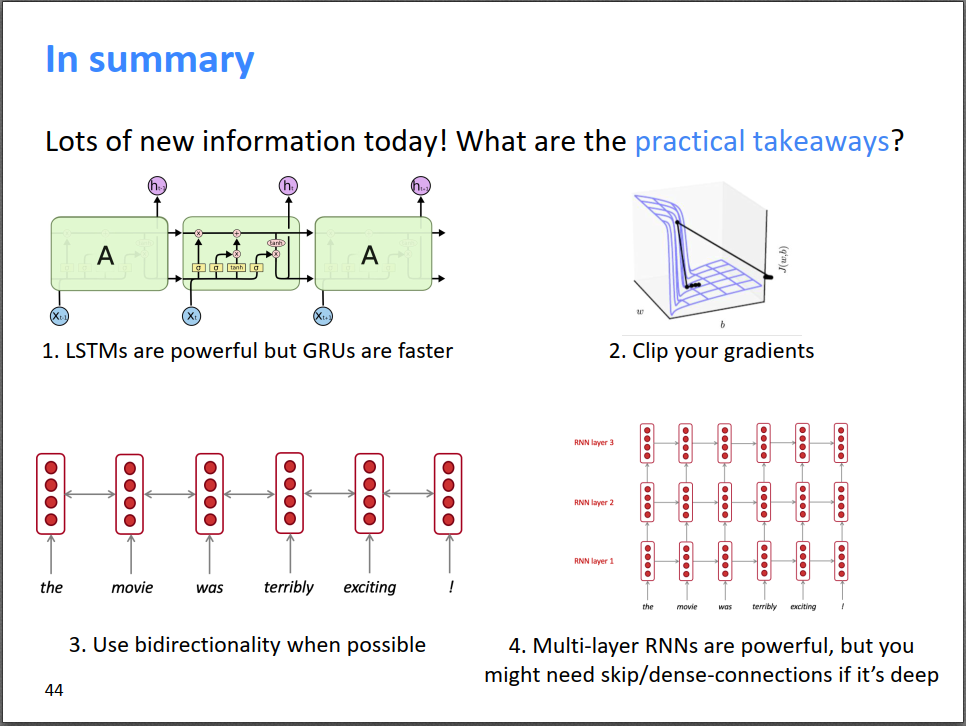
总结,一图胜千言。